Additional Parameters for Body Models¶
When using the AGX Dynamics plugin, the following additional parameters are available for body models.
Syntax¶
links:
-
name: Arm
jointCompliance: 1e-8
jointSpookDamping: 0.0333
jointMotor: true
jointMotorCompliance: 1e-8
jointMotorSpookDamping: 0.0333
jointMotorForceRange: [ -1000, 1000 ]
jointRangeCompliance: 1e-8
jointRangeSpookDamping: 0.0333
jointRangeForceRange: [ -1000, 1000 ]
jointLock: true
jointLockCompliance: 1e-8
jointLockSpookDamping: 0.0333
jointLockForceRange: [ -1000, 1000 ]
convexDecomposition: true
AMOR: true
autoSleep: true
collisionDetection:
excludeTreeDepth: 3
excludeLinks: [ ]
excludeLinksDynamic: [ ]
excludeLinkGroups:
-
name: groupA
links: [ linkA, linkB, linkC, ... ]
-
name: groupB
links: [ linkZ, linkY, linkX, ... ]
excludeSelfCollisionLinks: [ linkP ]
excludeLinksWireCollision: [ linkQ, linkR, ... ]
Parameter Descriptions¶
Link Parameters¶
Parameter |
Default Value |
Unit |
Type |
Description |
|---|---|---|---|---|
jointCompliance |
1e-8 |
m/N or rad/Nm |
double |
Joint compliance. Smaller values make joints more rigid, larger values make them more flexible. |
jointSpookDamping |
0.0333 |
s |
double |
Joint spook damping |
jointMotor |
false |
- |
bool |
Enables joint motor. Automatically enabled when ActuationMode is JOINT_TORQUE or JOINT_VELOCITY. |
jointMotorCompliance |
1e-8 |
m/N or rad/Nm |
double |
Joint motor compliance. Used for velocity control. Smaller values produce higher output to reach target velocity. Larger values may fail to resist external forces (gravity, contact forces) and not reach target velocity. |
jointMotorSpookDamping |
0.0333 |
s |
double |
Joint motor spook damping |
jointMotorForceRange |
[ double_min, double_max ] |
N or Nm |
Vec2 |
Maximum and minimum force/torque limits for joint motor |
jointRangeCompliance |
1e-8 |
m/N or rad/Nm |
double |
Joint range limit compliance. Smaller values produce higher output to maintain joint limits. Larger values may allow exceeding limits due to external forces (gravity, contact forces). |
jointRangeSpookDamping |
0.0333 |
s |
double |
Joint range limit spook damping |
jointRangeForceRange |
[ double_min, double_max ] |
N or Nm |
Vec2 |
Maximum and minimum force/torque for joint range limits |
jointLock |
false |
- |
bool |
Enables joint locking. Used for position control. Automatically enabled when ActuationMode is JOINT_ANGLE. |
jointLockCompliance |
1e-8 |
m/N or rad/Nm |
double |
Joint lock compliance. Smaller values produce higher output to reach target position. Larger values may fail to resist external forces (gravity, contact forces) and not reach target position. |
jointLockSpookDamping |
0.0333 |
s |
double |
Joint lock spook damping |
jointLockForceRange |
[ double_min, double_max ] |
N or Nm |
Vec2 |
Maximum and minimum force/torque for joint lock |
convexDecomposition |
false |
- |
bool |
Enable/disable convex decomposition. Specify true or false. |
AMOR |
false |
- |
bool |
Merges relatively stationary rigid bodies to reduce solver computational load. Specify true or false. Also requires setting the corresponding property in AGXSimulator Item. |
autoSleep |
false |
- |
bool |
Enable/disable auto sleep. Specify true or false. Removes stationary rigid bodies from solver to reduce computational load. The AutoSleep property in AGXSimulator Item must also be set to true. |
Collision Detection Settings¶
Parameter |
Default Value |
Unit |
Type |
Description |
|---|---|---|---|---|
excludeLinksDynamic |
- |
- |
string list |
Disables collision detection for specified links. However, collisions with special objects like wires remain enabled. |
excludeLinkGroups:
-
name
links
|
- |
- |
string
string list
|
Disables collisions between links registered in the group.
Group name (optional)
Link names
|
excludeSelfCollisionLinks |
- |
- |
string list |
Disables self-collision between specified links and the body |
excludeLinksWireCollision |
- |
- |
string list |
Disables collision between specified links and AGXWire |
The standard Choreonoid Collision Detection Setting parameters “excludeTreeDepth” and “excludeLinks” can also be specified.
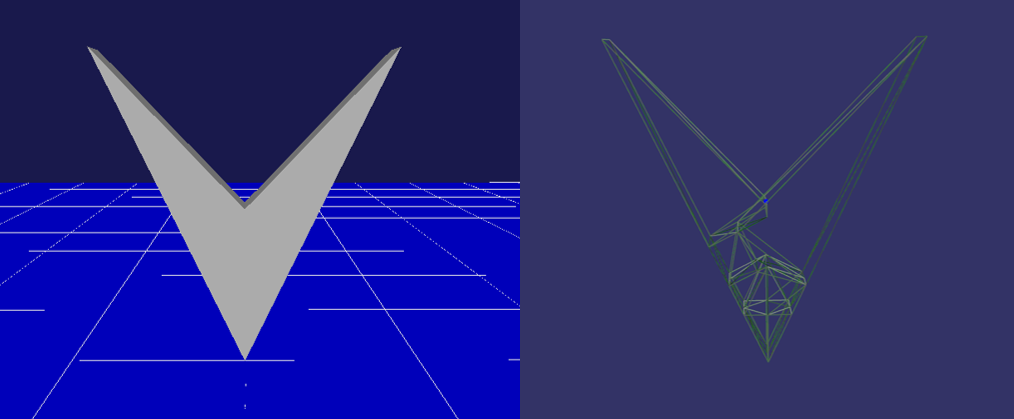
Convex Decomposition¶
AGX Dynamics includes functionality to decompose triangular mesh shapes into convex shapes. When convexDecomposition is set to true for a link parameter, convex decomposition of triangular mesh shapes is performed. Convex decomposition can potentially improve collision detection performance.
Note
Convex decomposition may fail for complex shapes.
Note
Contact points may differ between triangular meshes and convex decomposed shapes, potentially resulting in different collision behavior.
Samples are available at:
Project file: choreonoid/sample/AGXDynamics/agxConvexDecomposition.cnoid
Body file: choreonoid/sample/AGXDynamics/vmark.body
When you run the sample, convex decomposition is executed and the shape is composed of multiple convex shapes.